

Você está agora seguindo
Erro seguindo usuário.
Esse usuários não permite que o sigam.
Você já está seguindo esse usuário.
Seu plano permite apenas 0 seguidas. Aprimore-o aqui.
Deixou de seguir com sucesso
Ocorreu um erro ao deixar de seguir o usuário.
Você recomendou com sucesso
Ocorreu um erro ao recomendar o usuário.
Algo deu errado. Por favor, atualize a página e tente novamente.
E-mail verificado com sucesso

busan,
korea, republic of
Atualmente, está 8:59 PM aqui
Ingressou em novembro 1, 2019
3
Recomendações
Muhammad Hamza K.
@hamzakhan0496
4,4
4,4
91%
91%
busan,
korea, republic of
100%
Trabalhos Concluídos
80%
Dentro do Orçamento
86%
No Prazo
12%
Taxa de Recontratação
Research Assistant, Robotics & Control Engineering
Contate Muhammad Hamza K. sobre seu trabalho
Faça login para discutir quaisquer detalhes via chat.
Portfólio
Portfólio

SolidWorks to Matlab/Simulink (Simmechanics Toolbox)


Root Locus and Step Response of System

Root Locus and Step Response of System
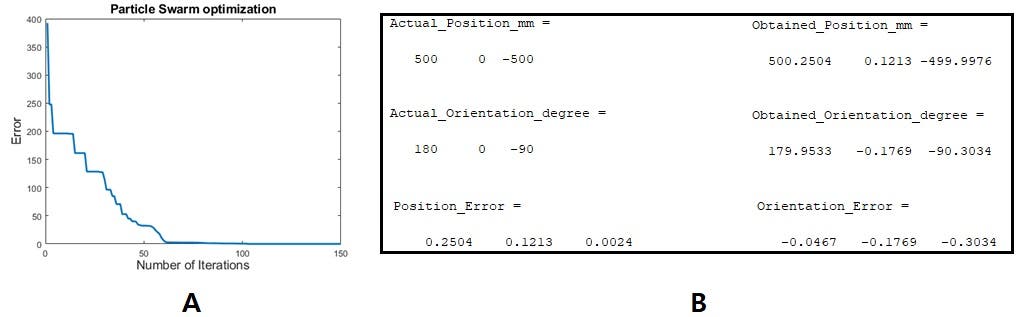

Inverse Kinematics of Robot Using Particle Swarm Optimizatio

Inverse Kinematics of Robot Using Particle Swarm Optimizatio
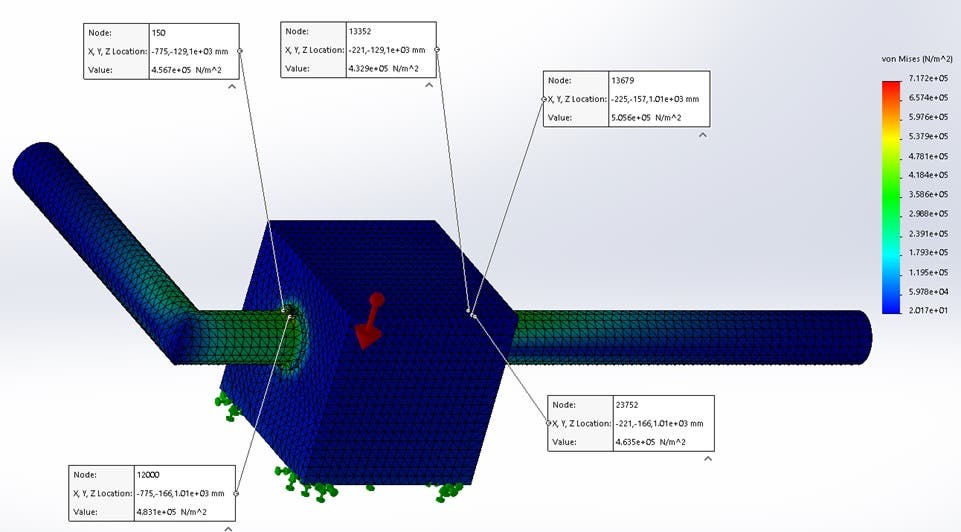

Finite Element Analysis Using Solidworks


Simulink - Joystick (Robot Control)


Robot Workspace Plot
SolidWorks to Matlab/Simulink (Simmechanics Toolbox)
Root Locus and Step Response of System
Root Locus and Step Response of System
Inverse Kinematics of Robot Using Particle Swarm Optimizatio
Inverse Kinematics of Robot Using Particle Swarm Optimizatio
Finite Element Analysis Using Solidworks
Simulink - Joystick (Robot Control)
Robot Workspace Plot
Avaliações
Mudanças salvas
Mostrando 1 - 5 de 26 avaliações
$95,00 USD
Engineering
Matlab and Mathematica
Electrical Engineering
Arduino
+1 mais
K

•
$95,00 USD
Engineering
Matlab and Mathematica
Electrical Engineering
Arduino
+1 mais
K
•
$60,00 USD
Engineering
Matlab and Mathematica
Electrical Engineering
Arduino
+1 mais
K
•
$60,00 USD
K
•
€40,00 EUR
Engineering
Matlab and Mathematica
Electrical Engineering
Arduino
+1 mais
Z

•
Experiência
Research Assistant
fev. 2019 - Atual
Provide assistance in the different research area in Mechanical Engineering which includes
Robotics
CAD Design
Control Engineering
Research Paper writing
Research Assistant
fev. 2017 - ago. 2018 (1 ano, 6 meses)
Worked on an Assistive Robot for Paraplegics patient which assist the patient to transform their position from sitting to stand and vice versa, and to help the patients to move around in an environment using mobile platform which is being controlled using Joystick
Internee
internship at Aircraft Manufacturing Factory. Learned about the designing and production of a part on 3-axis and 5-axis CNC milling machine
Educação
Mechanical Engineering, Graduate School
(Menos de um ano)
Mechatronics Engineering
(4 anos)
Qualificações
Best Paper Presentation
Pusan National University
2020
Best paper presentation award in The international conference on Power and Energy Application - ICPEA'2020
Best Poster Presentation
National University of Science and technology-NUST
2019
Best Poster presentation of Research Paper accepted in conference ICRAI'19, NUST Pakistan
Publicações
Robot End-Effector Force Estimation
CACS'2020
Robot end-effector force estimation using non-linear observer (sliding perturbation observer) for dual 7-DOF robot arm for parts assembling process.
SMC-based impedance control tuning using PSO
ISAROB'2021
Tuning of robot end-effector force tracking impedance control using particle swarm optimization.
Robust Control of Assistive Robot for Paraplegics
Springer - IJCAS
Robust control of an assistive robot designed to assist paraplegic patients to transform their position from sitting to standing and vice versa based on Sliding mode control integrated with a non-linear observer known as Sliding perturbation observer (SMCSPO)
Inverse Kinematics and Control of Teleoperated 6-DOF Scara
IEEE Access
DPSO and Inverse Jacobian-Based Real-Time Inverse Kinematics With Trajectory Tracking Using Integral SMC for Teleoperation.
https://doi.org/10.1109/ACCESS.2020.3020318
Inverse Kinematics Using Particle Swarm Optimization
IFAC'2020
Real-Time Inverse Kinematics Using Dual Particle Swarm Optimization DPSO of 6-DOF Robot for Nuclear Plant Dismantling.
Control of an Assistive Robot for Paraplegics
IJMERR - ICPEA'2020 Busan, IEEE
Control of an Assistive Robot for Paraplegics using PID Controller with Sliding Perturbation Observer.
Non-linear control of an assistive robot in the presence of disturbance
Implementation of a TSMCSPO Controller on a 3 DOF Robot
IEEE Access
Implementation of a TSMCSPO Controller on a 3-DOF Hydraulic Manipulator for Position Tracking and Sensor-Less Force Estimation
Control of 3 DOF robot by means of teleoperation for nuclear plant dismantling
A Simulation for a 7-DOF Manipulator on Trajectory Tracking Control in MATLAB
IEEE - Conference
Trajectory tracking and control of 7 DOF robot arm being used in the assembly process of different parts.
Robust Control Design of 6-DOF Robot for Nuclear Power Plant Dismantling
IEEE - Conference
Designed control algorithm for the robot which is being used for the dismantling of a nuclear power plant.
Robust Controller Design for Non-linear System with Perturbation Compensation
Springer - Conference
A new technique for the non-linear systems is introduced to control them with perturbation compensator so that the output result of the system is precise.
Tele-Operated Bilateral Control of Hydraulic Manipulator Using a Robust Controller
MDPI - Applied Sciences
Tele-Operated Bilateral Control of Hydraulic Manipulator Using a Robust Controller Based on the Sensorless Estimated Reaction Force.
SCI Journal Paper
Contate Muhammad Hamza K. sobre seu trabalho
Faça login para discutir quaisquer detalhes via chat.
Verificações
Certificações
Principais Habilidades
Busque Freelancers Parecidos
Busque Mostruários Parecidos
Convite enviado com sucesso!
Obrigado! Te enviamos um link por e-mail para que você possa reivindicar seu crédito gratuito.
Algo deu errado ao enviar seu e-mail. Por favor, tente novamente.
Não foi possível copiar para a área de transferência, por favor, tente novamente após ajustar suas permissões.
Copiado para a área de transferência.
Carregando pré-visualização
Permissão concedida para Geolocalização.
Sua sessão expirou e você foi desconectado. Por favor, faça login novamente.